
- Emballage - Logistique - Manutention
- Manutention et Levage
- Pince de préhension pneumatique
- Hangzhou FOUK Mechanical Technology Co., Ltd.
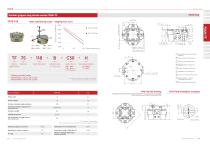
Pince de préhension à 4 mâchoires TF75-118pneumatiqueparallèlepour robots industriels

Ajouter à mes favoris
Ajouter au comparateur
Caractéristiques
- Actionnement
- pneumatique
- Type
- parallèle
- Nombre de mâchoires
- à 4 mâchoires
- Applications
- pour robots industriels
- Options
- 4 doigts, protégée
- Force de préhension
370 N, 386 N
- Course
10 mm
(0,394 in)
Description
Options de configuration :
B : Ventilation en bas
C30 : Longueur de la tige de poussée
H : Résistance aux hautes températures
La pince pneumatique de centrage à quatre doigts, dotée d'une structure portante en forme de T, supporte différentes plaques de poussée. Son ressort de trempe a une durée de vie de plus de 500 000 fois. La force de préhension de la pince à quatre doigts est uniforme, ce qui permet de saisir les objets de manière stable et d'éviter les dommages.
---
Catalogues
Autres produits Hangzhou FOUK Mechanical Technology Co., Ltd.
Pneumatic Grippers
































Recherches associées
- Préhenseur pneumatique
- Préhenseur parallèle
- Préhenseur à 2 mâchoires
- Préhenseur pour robots industriels
- Préhenseur à 3 mâchoires
- Préhenseur angulaire
- Préhenseur concentrique
- Préhenseur léger
- Préhenseur grande course
- Pince de préhension à 4 mâchoires
- Préhenseur 2 doigts
- Pince de préhension 3 doigts
- Pince de préhension hydraulique
- Pince de préhension 4 doigts
- Module de préhension
- Pince de préhension étanche
- Pince de préhension flexible
- Pince de préhension industrielle
- Module de préhension pneumatique
- Module de préhension pour robot collaboratif
* Les prix s'entendent hors taxe, hors frais de livraison, hors droits de douane, et ne comprennent pas l'ensemble des coûts supplémentaires liés aux options d'installation ou de mise en service. Les prix sont donnés à titre indicatif et peuvent évoluer en fonction des pays, des cours des matières premières et des taux de change.